
1. ใช้ LED ส่องแสง
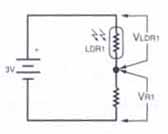
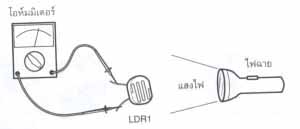
2. ใช้ LDR รับแสง ค่าความต้านทานจะเปลี่ยนตามปรมาณแสงที่ได้รับ ( การกระทบวัตถุ แล้วสะท้อนกลับมา)
3. นำค่าความต้านทานที่เปลี่ยนเข้าวงจรแบ่งแรงดัน จะได้ค่าแรงดันตกคร่อมเปลี่ยนแปลงตามปริมาณแสง
4. อาจเข้าวงจร แปลงสัญญาณอะนาล็อกเป็นดิจิตอล เพื่อประมวลผลด้วย ไมโครโคนโทรลลเลอร์
หรือ เข้าวงจรเปรียบเทียบแรงดัน จากวงจรออปแอมป์
5. ส่วนใหญ่ ใช้ในวงจร ตามคน, หลบสิ่งกีดขวาง, หรือจับเส้น
หมายเหตุ
วงจรนี้มักมีปัญหา แสงจากสภาพแวดล้อมรบกวน เมื่อปรับแต่งแล้ว หากย้ายที่อาจต้องปรับแต่งใหม่
จึงไม่เหมาะสำหรับการเปลี่ยนตำแห่งที่ตั้ง ( หากนำมาจับเส้น ต้องให้บริเวณข้างล่าง มีแสงมากวนน้อยที่สุด)





ไม่มีความคิดเห็น:
แสดงความคิดเห็น